



Project Description
AirSim – Simulator Engine for drones, cars and other vehicles based on Unreal Engine
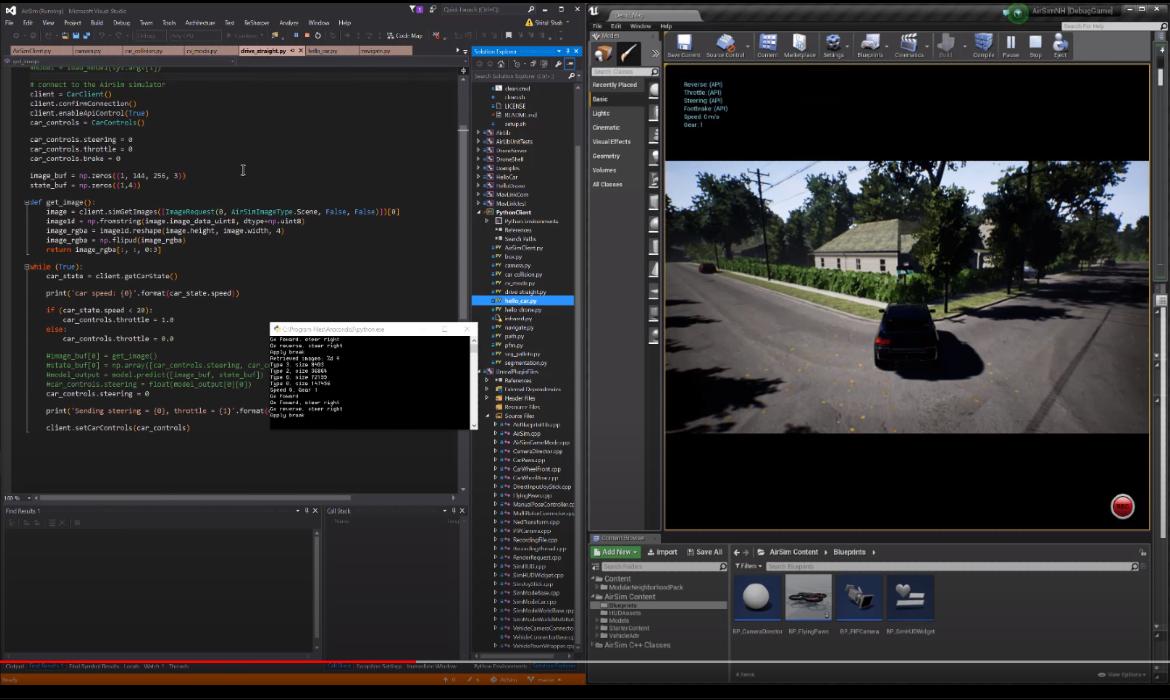
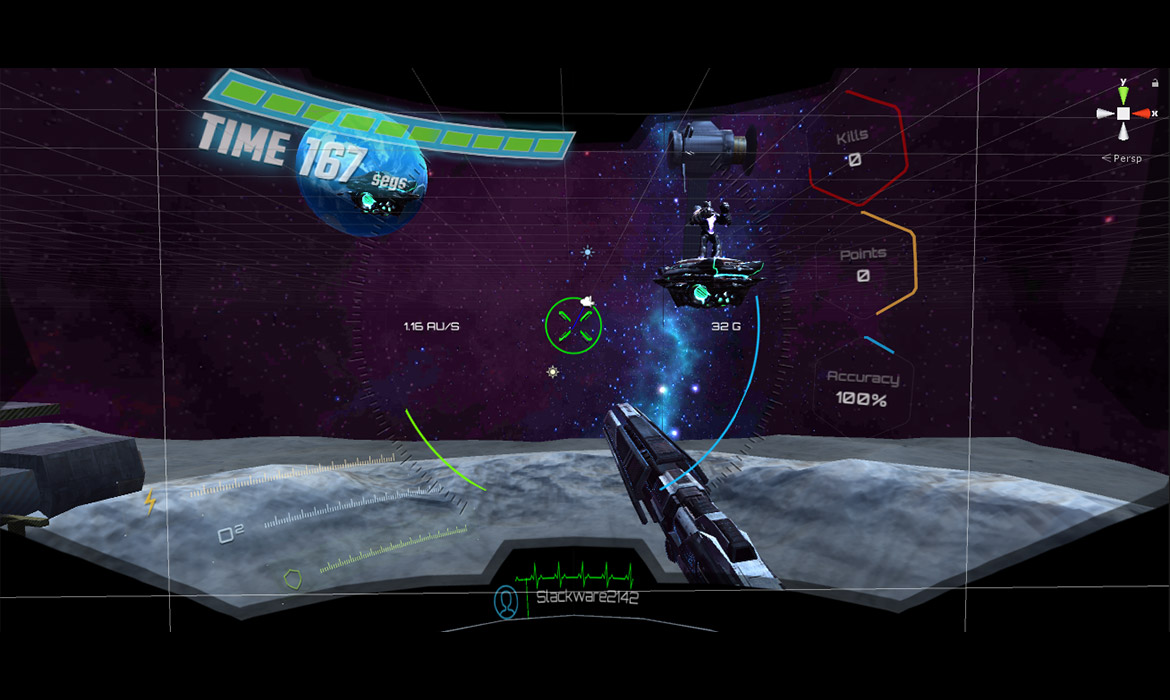
AirSim is a simulator engine for drones, cars and more, built on Unreal Engine (it also includes a Unity version). It is open-source, cross platform, and supports software-in-the-loop simulation with popular flight controllers such as PX4 & ArduPilot and hardware-in-loop with PX4 for physically and visually realistic simulations. It is developed as an Unreal plugin that can simply be dropped into any Unreal environment. AirSim is a platform for AI research to experiment with deep learning, computer vision and reinforcement learning algorithms for autonomous vehicles. For this purpose, AirSim also exposes APIs to retrieve data and control vehicles in a platform independent way.
Our client, needed an extended version of AirSim, including several additions on top of the initial AirSim version:
- Simulation of motion of our own objects in our own environments
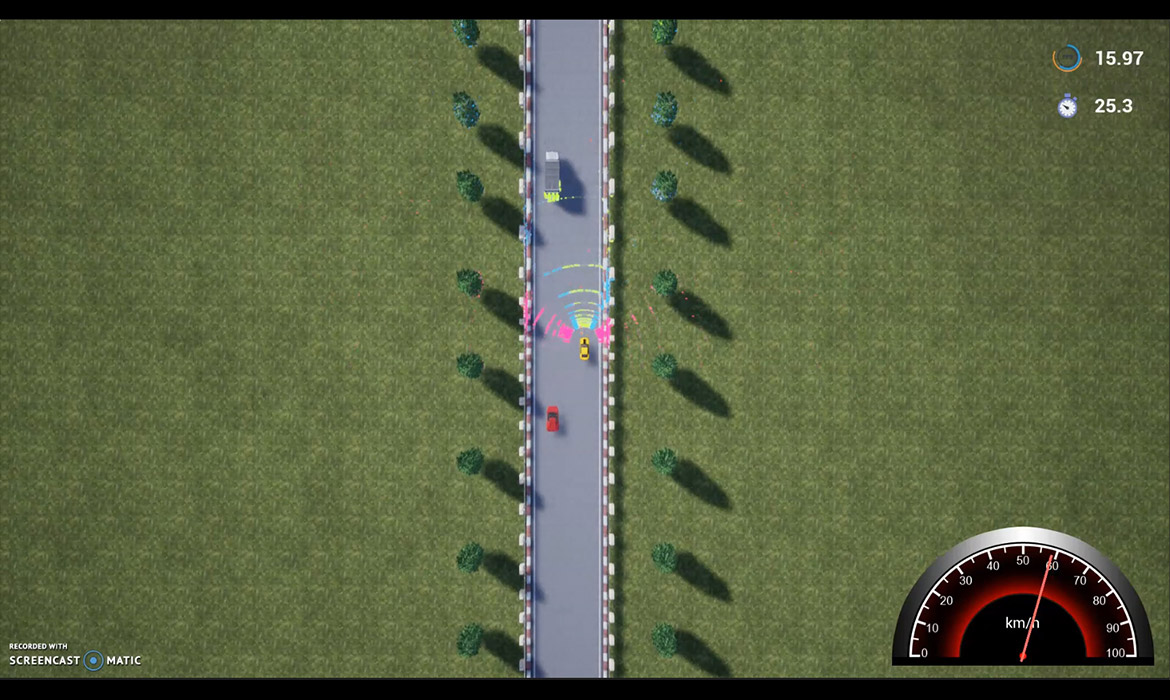
- Control the motion of the objects in AirSim from an external program (e.g., a program we call MultiVis) through the network (or using game controllers through the USB port)
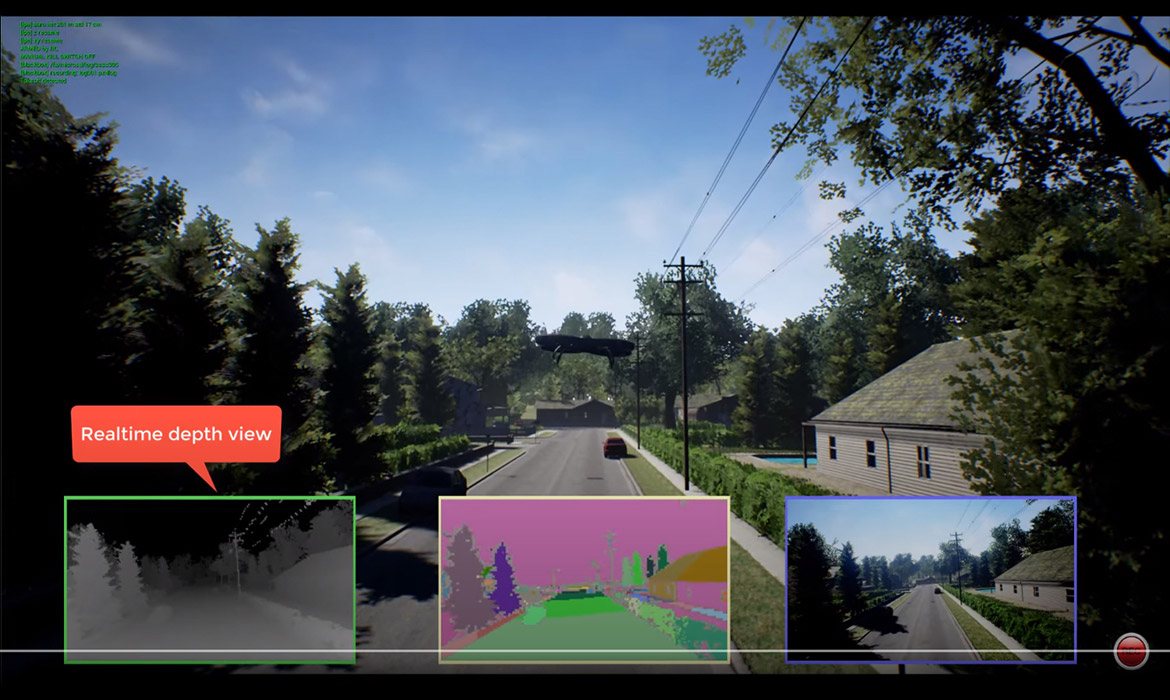
- Export the sensor outputs from AirSim through the network to MultiVis (or save to a file)
- Instead of creating environments manually, we used real-world geographic information sources such as OpenStreetMap, SRTM and DTED to automatically generate environments, landscapes, waterbodies, buildings and terrains. Automatic landscape generation from GIS data: using SRTM/DTED/CDED and
OSM roads/buildings and any other open source GIS data to generate realistic globalscale landscapes (terrains, forests, roads, railway tracks, waterbodies, sky, etc.).

AirSim Demo (Video)

AirSim Demo (Video)
AirSim Drone
AirSim sensors

AirSim Demo

AirSim Demo

AirSim Drone
AirSim






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}